
Робототехника в сфере складской логистики


Робототехника, что именно это значит? Когда машина становится роботом? Что нам предложит робототехника в будущем? Как робототехника применяется уже сейчас?
Автоматизация является одним из главных направлений развития в секторе внутрипроизводственной логистики. Данная тенденция развивается прежде всего за счет бурного развития онлайн-торговли и нехватки специалистов в области логистики по всему миру, в частности это касается операторов складской подъемно-погрузочной техники. Растущий объем товаров с комплексным управлением возвратами, строго синхронизированные процессы доставки, все более короткие сроки обработки и сложная складская среда требуют автоматизированных управляемых транспортных средств, которые работают автономно.

Еще в 1962 году компания Jungheinrich выпустила свое первое транспортное средство с автоматическим управлением. С тех пор компания стала одним из ведущих поставщиков на быстро растущем рынке автоматизированного подъемно-транспортного оборудования. Предлагая современное ПО и передовую технологию навигации, компания непрерывно расширяет ассортимент решений для автоматизации складской техники.
В 2020 году Jungheinrich AG, головной офис которой находится в г. Гамбург, приобрела долю в мюнхенском робототехническом стартапе Magazino GmbH. Компании договорились о масштабном стратегическом сотрудничестве и намерены объединить накопленные знания в области автоматизации склада. Magazino занимается разработкой и изготовлением транспортных роботов, которые анализируют окружающую обстановку и умеют принимать решения исходя из ситуации. В 2014 году компания вышла на рынок, представив самоходного робота-комплектовщика заказов, который умеет перемещаться по складу по оптимальным маршрутам и точно подбирать нужные коробки. Эта система уже используется на складах различных компаний в области e-commerce.

Автоматизированные машины работают вместе с людьми и имеют более высокие показатели гибкости и эффективности в области электронной коммерции, автомобилестроения, моды и логистики производства. Современные производства без промышленных роботов невозможны. Автомобили почти исключительно построены гигантскими промышленными роботами, которые выполняют одни и те же движения и одни и те же рабочие шаги чрезвычайно точно и быстро снова и снова. Это возможно в полностью статичной среде с использованием обычного набора алгоритмов. Обычные автоматизированные управляемые транспортные средства требуют модифицированной рабочей среды или спецификации фиксированных маршрутов – например, оптических направляющих или наземных меток.
В случае Jungheinrich наша область-склад, и навигация состоит в первую очередь из двух вещей: во-первых, найти путь к заданной локации, избегая препятствий, и, во-вторых, совершить требуемую операцию по обработке груза. Например, оказавшись на месте, роботы должны определить целевой объект на полу или на стеллаже, а затем успешно взять его. AGV, или автоматизированные управляемые транспортные средства, в первую очередь применяются на складе для повторяющихся операций: перемещают товары из одной точки в другую, штабелируют грузы на стеллажах или осуществляют погрузку/разгрузку грузового транспорта.
Однако существует один спорный момент в терминологии: являются ли робототехника и автоматизация синонимами?
Если присмотреться повнимательнее, то многие обычные роботы сегодня являются лишь очень мощными машинами. Хотя эти роботы являются современными, они подпадают под зонт традиционной робототехники. Их действия полностью предопределены, что означает, что они детерминированы и не автономны. Другим примером может служить стиральная машина. Как только кнопка нажата, она начинает свою стандартную рабочую процедуру. Здесь нет никаких вариаций.
В то же время, роботы-это сенсомоторные машины с расширенными возможностям действовать там, где не сможет человек. Они состоят из мехатронных компонентов, датчиков и компьютерных функций управления. Сложность робота существенно отличается от других машин большим числом степеней свободы и разнообразием и размахом его поведенческих форм. Таким образом самое большое различие между простой машиной и роботом - это способность действовать автономно в определенных ситуациях.
Чем разнообразнее и динамичнее пространство, тем умнее роботы должны быть. Это включает в себя их способность перемещаться автономно.
Склады в реальном мире-это не статика. Люди работают в них и непрерывно меняют окружающую среду; товары перемещаются, новые препятствия приходят и уходят. В любой среде, где работают люди, среда динамична и подвержена изменениям. Люди - не роботы, их движения не предопределены заранее. Люди не помещают предметы с точностью до миллиметра, идеально выровненные с полкой. Робот должен уметь работать с этим человеческим хаосом-эффективно и безотказно.

В каждой ситуации робот должен определить оптимальный маршрут движения через склад и где лучше всего захватить целевой объект. Он также сталкивается с препятствиями и другими движущимися объектами. Чтобы работать надежно и слаженно, даже в таких условиях, роботам необходим навык: умение приспосабливаться. Для этого им нужно как можно больше информации о текущей ситуации в их окружении. С помощью этой информации они могут затем адаптировать свои пути и работать более эффективно. Эта концепция основана на том, что отдельные роботы могут собирать данные о своей локальной среде во время работы. Таким образом, наш подход заключается в облачном отображении и локализации в динамических складских средах. Каждый раз, когда робот проходит по проходу, он воспринимает свое окружение через датчики и камеры. Если на пути ему попадается препятствие, он останавливается и ищет другой путь, чтобы добраться до места назначения.
Чтобы успешно перейти из пункта А в пункт Б, они должны сначала локализовать себя, а затем преодолеть препятствия и новые ситуации на своем пути. Для этого роботы оснащены интеллектуальными алгоритмами и коллективным восприятием.
Уже не фантастика, если робот А может поделиться своими знаниями с роботом Б. В сотрудничестве с Google Cartographer для роботов Magazino дополнительно разработана библиотека локализации и картографирования в реальном времени. В конкретных терминах это означает, что каждый робот на складе посылает данные в облако и одновременно сравнивает свою сохраненную внутреннюю карту хранилища с данными в облаке. Таким образом, роботы уже могут делиться своими знаниями об окружающей среде и использовать их для локальной оптимизации. Можно сказать, что группа роботов воспринимает окружающую среду коллективно и постоянно совершенствуются вместе: роботы -это настоящие командные игроки. Благодаря новой технологии автоматизации они могут работать вместе с людьми. Гибкое планирование маршрута, интеллектуальное избегание препятствий и сетевая коммуникация позволяют роботу самостоятельно выполнять заказы на хранение и извлечение данных.
Например, самообучающиеся роботы-сборщики освобождают своих коллег-людей. На складе эти роботы могут не только выполнять отдельные шаги, но и фактически выполнять все операции, которые выполняет человек-работник, например, завершить весь процесс комплектации. Это означает, что робот может продолжать работать ночью, после того, как люди закончат свои смены.

Подключенные к системе управления складом, они получают свои заказы на подбор через Wi-Fi. Затем они автономно перемещаются к нужной полке, идентифицируют целевой объект с помощью своих камер и датчиков, захватывают его, хранят и транспортируют для дальнейшей обработки.
Однако, робототехника будущего выглядит иначе.
Продвинутый робот должен принимать свои собственные решения.
В двух словах можно сказать, что завтрашняя робототехника уже не детерминистична, она гибка, интеллектуальна и автономна. Настоящий квантовый скачок. Чтобы понять степень этого изменения, мы сделаем еще один шаг назад и посмотрим на (все еще) воображаемую стиральную машину: с помощью различных датчиков стиральная машина распознает, какое белье она должна стирать сегодня. Например, черная спортивная одежда. Зная это, он выбирает соответствующее моющее средство и температуру. Он использует уровень воды в машине для расчета продолжительности цикла стирки. И если запасы моющего средства заканчиваются, он отправляет заказ в заранее определенный интернет-магазин. Это поведение намного умнее, чем обычный промышленный робот, но это далеко не “продвинутый робот”, потому что стиральная машина не автономна. Его поведенческое пространство все еще крайне ограничено, ему не хватает способности реагировать на новые ситуации. Он хорошо запрограммирован, его датчики работают, но только в определенной области. Если “черный” и "спортивная одежда" не отображаются в коде программы, она не может работать.
И преодоление именно этой задачи стартап делает роботов "продвинутыми" в прямом смысле этого слова. Роботы могут не только адаптировать индивидуальные параметры своих действий, но и принимать решение о выполнении совершенно разных действий в зависимости от ситуации. Способность адаптироваться позволяет роботам справляться со сложными реальными проблемами.
Роботам будущего нужен мозг.
В прошлом роботы были очень детерминистичны – можно сказать, трудолюбивы, но глупы. После того, как они запрограммированы, они помещают, к примеру, сварочный инструмент в одно и то же место тысячи раз с фиксированной скоростью. Более того, поскольку эти роботы не воспринимали окружающее, не говоря уже о способности разумно реагировать на него, они должны были работать, отделенные от людей перегородками в отдельных цехах. Это коренным образом изменилось. Отсюда вытекают два следствия: окружающая среда может быстро изменяться, и робот всегда должен действовать безопасно. Благодаря использованию многочисленных датчиков, 3D камеры и компьютерное зрение, роботы нового поколения теперь лучше понимают, что происходит в их среде. В то же время окружающая среда для роботов становится все более сложной, особенно если им приходится работать с людьми в одной и той же области. Существующие программные инструменты и системы управления больше не могут соответствовать этим требованиям. Нам нужны радикально новые подходы к программированию, управлению и созданию сетей роботов. Это происходит потому, что роботы следующего поколения уже не детерминированы, а управляются восприятием. Поэтому разработан ACROS. Можно сказать, что это что-то вроде мозга для роботов.

ACROS расшифровывается как” Advanced Cooperative Robot Operating System " и является операционной системой, разработанной для управляемых восприятием роботов Magazino. ACROS делает возможной управляемую восприятием робототехнику.
В прошлом роботы всегда программировались их индивидуальными производителями с помощью специального программного обеспечения, специально адаптированного к их соответствующим потребностям.
ACROS впервые позволяет программировать различные типы роботов с помощью комплексной "операционной системы". Это позволило бы физическим (аппаратным) компонентам роботов стать взаимозаменяемыми в будущем-интеллект лежит в программной структуре ACROS. ACROS связывает данные всего эксплуатируемого парка и немедленно сообщает об изменениях окружающей среды всем роботам. Они подключены через Wi-Fi к локальному облаку, которое, в свою очередь, связано с соответствующей системой управления складом. Таким образом, роботы могут получать свои заказы, подтверждать их выполнение и получать обновления программного обеспечения или среды.
В сочетании с приложением ARC (ACROS Robot Control) происходит мониторинг отдельных роботов или всего автопарка. Менеджер склада или производства может следить за путями и действиями своих роботов на интуитивно понятном пользовательском интерфейсе. Это позволяет ему получить быстрый обзор заказов, которые уже были завершены, текущих заказов и предстоящих заказов в любое время.
Продвинутые кооперативные роботы могут учиться самостоятельно: сеть ACROS и подключенная глобальная база данных обеспечивают машинное обучение и, следовательно, интеллектуальное поведение.
И вот тут-то и есть экстраординарный потенциал. Поскольку все больше роботов по всему миру работают с ACROS, больше знаний собирается в облаке. Благодаря этой сети роботы могут учиться друг у друга и постоянно совершенствоваться.
И как это будет выглядеть в будущем?
ACROS будет совместим с многочисленными типами роботов. Только аппаратные компоненты ACROS должны быть адаптированы, например, для управления роботизированным манипулятором. Еще одним важным преимуществом будет то, что все роботы будут работать с ACROS вы сможете поделиться своим "опытом" в облаке.
Наше роботизированное решение может быть гибко адаптировано к изменяющимся условиям или растущим требованиям – например, за счет увеличения размера парка роботов или расширения области их применения.
Внедрение комплектовочного робота TORU в Европейском распределительном центре компании ASICS.
Как роботы применяются на практике?
Продолжающийся рост электронной коммерции и все меньшие размеры партий требуют автоматизированных решений, которые могут быть гибко адаптированы и масштабированы по мере необходимости. В феврале 2020 года робототехническая компания Magazino выиграла тендер компании ASICS* в качестве поставщика мобильного робота TORU. С Ведущий спортивный бренд ASICS будет использовать роботов в своем европейском дистрибьюторском центре (EDC) в Крефельде, Германия. С внедрением интеллектуальных и мобильных роботов-сборщиков ASICS стала одним из инновационных пионеров в этой отрасли. Используя робота TORU, ASICS внедряет гибкую автоматизацию процесса ручной комплектации на своем обувном складе.
Мобильный сборный робот TORU работает полностью автономно с помощью технологии 3D-камеры, многочисленных датчиков и может работать как в выходные, так и в ночное время. TORU сокращает типичные пики заказов в электронной коммерции и улучшает обслуживание клиентов, обеспечивая более быструю обработку срочных заказов.
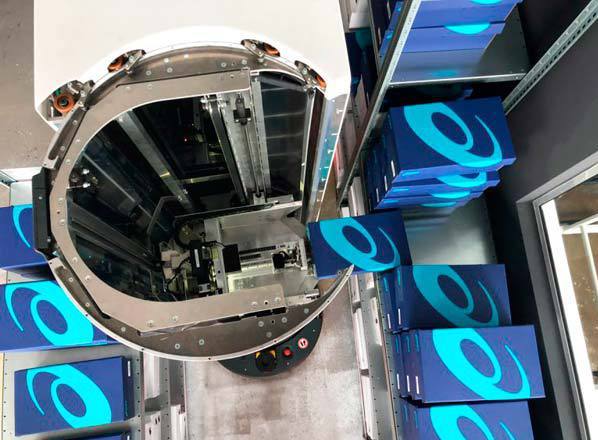
TORU едет по коридору на складе и хочет повернуть налево, только чтобы обнаружить, что проход заблокирован человеком. TORU не просто останавливается, он сразу же вычисляет альтернативный маршрут до места назначения. По прибытии он не находит целевой пакет в его ожидаемом месте. С помощью своих камер он теперь обыскивает окрестности, чтобы найти нужный объект, успешно захватывая его. С помощью вакуумного захвата TORU забирает отдельные обувные коробки из стеллажной системы, транспортирует их на станцию передачи, а также укладывает возвраты. Через Wi-Fi робот подключается не только к системе управления складом ASICS (WMS), но и к локальному и глобальному облаку, благодаря операционной системе ACROS. Благодаря этой связи и использованию искусственного интеллекта TORU каждый день учится на своем опыте, улучшает свою собственную производительность и надежность и в то же время делится знаниями со своими коллегами-роботами во группе.

TORU может избавить сотрудников от менее эргономичных задач, например, при выборе с нижней или верхней полки или с особенно больших расстояний ходьбы на складе. Благодаря многочисленным датчикам, Тору робот воспринимает окружающую среду в режиме реального времени, обнаруживает людей или препятствия на своем пути и поэтому работает в безопасном режиме рядом с людьми в той же рабочей зоне. Имея до 18 часов рабочего времени, TORU также может работать в ночное время.
Автоматизация является одним из главных направлений развития в отрасли внутрипроизводственной логистики последние пять лет. Новое стратегическое партнерство концерна Jungheinrich AG и инновационного стартапа Magazino вскоре откроет коммерческой отрасли доступ к эффективным и надежным решениям нового уровня, которые значительно изменят свойства и облик современного склада.
*О компании ASICS Corporation
Компания ASICS со штаб-квартирой в Кобе, Япония, является ведущим дизайнером, производителем и розничным продавцом высокоэффективной спортивной обуви, одежды и аксессуаров. Основанная в 1949 году Кихачиро Оницука, название компании происходит от латинского слова Anima Sana In Corpore Sano (“здоровый дух в здоровом теле”), и эта максима продолжает руководить деятельностью организации в целом. ASICS имеет региональные операции в Японии, Америке, Европе и Океании, а также в Южной, Восточной и Юго-Восточной Азии, распространяя продукцию более чем в 150 странах и регионах по всему миру. Компания также управляет классической обувью Onitsuka и брендом Haglofs outdoor.


